
OpenHarmony 有氧拳击之设备端开发

一、简介
在一个风和日丽,阳光明媚的下午,码农们都像往常一样正在专注地码代码。突然前面的小哥哥站起来,手握开发板,来回出拳。这是怎么回事?原来这是一款拳击互动游戏,本文将带你一同解开其中的奥秘。开发者从中不仅能体验到学习知识的愉悦,还能享受到健身的乐趣。依托 OpenAtom OpenHarmony(以下简称“OpenHarmony”)3.2 Beta1 操作系统,样例分为应用端和设备端两部分。本文主要介绍设备端的实现,后续会分享应用端的开发。
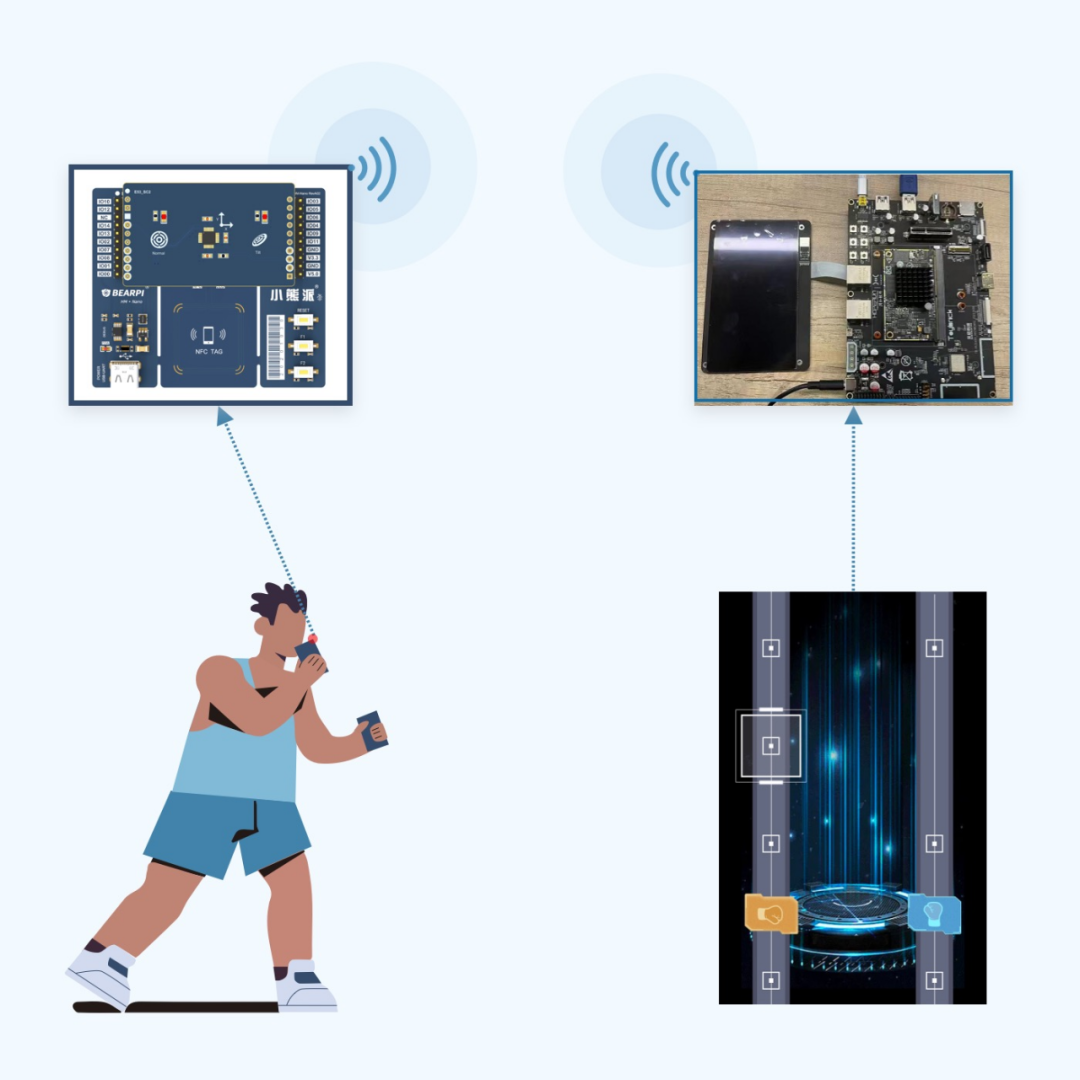
设备端:采用小熊派 BearPi-HM Nano(Hi3861)开发板,处理加速度计传感器数据。
应用端:采用润和 DAYU200(RK3568)开发板,主要处理显示及音效。
如下图,左侧为设备端,右侧为应用端:开发者手握设备端小熊派开发板,观察屏幕,根据应用端 APP 显示,在指定的时间完成挥拳动作;挥拳信息经无线传递到应用端,应用端 APP 对挥拳时机有相应的计分规则,最后统计出总分。
二、原理
相比正常状态下,挥拳动作会引起手臂较大的加速度变化。根据这个特征,我们使用 BearPi-HM_Nano 开发板的扩展模块 E53_SC2,它内部集成了 MPU6050 传感器,能够读取加速度的大小。
做挥拳动作实验,统计数据,得到挥拳时加速度的阈值。程序执行时,把实时的数据与阈值进行比较,判断是否触发了挥拳动作。再经过无线通信,实时把数据发送到应用端。
三、加速度计传感器使用说明
设备端的开发关键在对加速度计传感器的使用,主要涉及两点:1、重力加速度 g 的理解;2、如何把 MPU6050 寄存器的数据转化为有单位的数据?
1、样例使用的加速度传感器是 MPU6050,它有±2g、±4g、±8g 和±16g 四个量程可以选择。一个 g 是指一个重力加速度,代表 9.8 米/秒²大小。举个例子:假如设备从高处掉落,其加速计测量到的加速度将为 0g,因为传感器没有受到力的挤压,处在失重状态;假如设备水平放在桌面上,则加速计测量出的加速度为 1g(9.8 米/秒²),我们可以理解为受到 1g 的压力;
2、MPU6050 采用 16 位的 ADC 采样。16 位的 ADC 采样是什么意思?举个例子:如果量程选择(通过寄存器选择)是±2g,16 位的 ADC 采样,表示的含义是用 65536(即 2 的 16 次方)种情况去表达-2 到+2g 的情况。如下 datasheet 截图显示,AFS_SEL=0,表示±2g 量程,当数据寄存器的数据为 16384,对应表示受到 1g 的力。例如:数据寄存器读取到的值为 X,对应受到的力的大小为 Y,则 Y=X/16384,单位是 g。

四、代码解析
设备端代码主要分为两个线程:1、传感器数据处理线程;2、TCP 通信线程;它们之间通过事件的方式进行同步通信。
1、传感器数据处理线程主要函数说明:
2、TCP 通信线程主要函数说明:
在本样例的网络通信中,小熊派 BearPi-HM Nano(Hi3861)开发板作为客户端,润和 DAYU200(RK3568)开发板作为服务端。它们之间采用 TCP 机制通信。
如下代码:建立好 TCP 通信后,常规状态下通信线程处在阻塞态,当拳击事件触发后,则会发送信息给服务端:
五、代码构建、编译及烧录
1、OpenHarmony 3.2 Beta1 源码下载,地址参考文章结尾处链接;
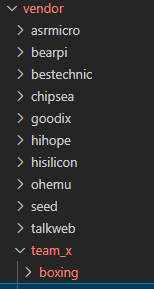
2、在源码根目录下的 vendor 目录下,新建 team_x 文件夹;
3、把 boxing 文件夹,拷贝到 team_x 目录下,如下图所示:
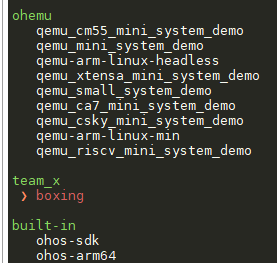
4、在源码目录下,输入 hb set,然后选择当前文件路径,即输入.(点),然后通过方向键选取 team_x 下的 boxing,如下图:
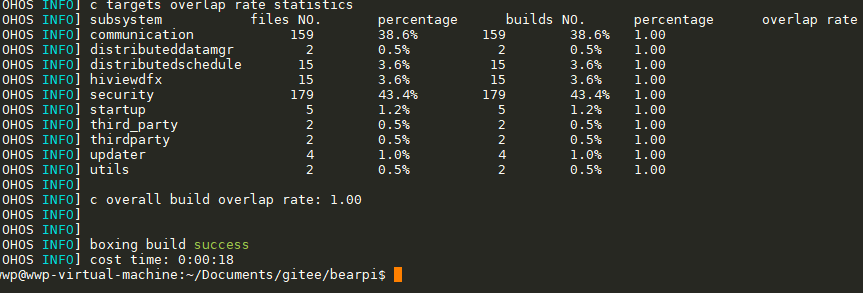
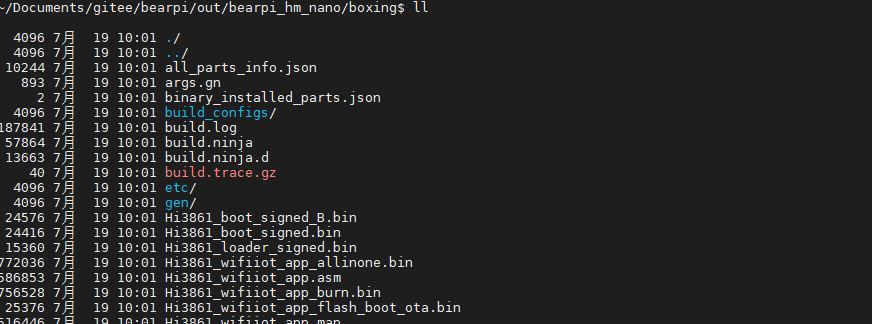
5、输入 hb build -f,开始编译,编译成功后,会在根目录下的 out/bearpi_hm_nano/boxing 目录生成 Hi3861_wifiiot_app_allinone.bin,如下图:
6、用 HiBurn 工具烧录程序,烧录参考链接在文章结尾处;
烧录成功后,可以本地验证项目是否成功:
1、电脑端使用网络调试助手软件,建立 TCP 服务端,电脑端建立服务端需要注意以下几点:
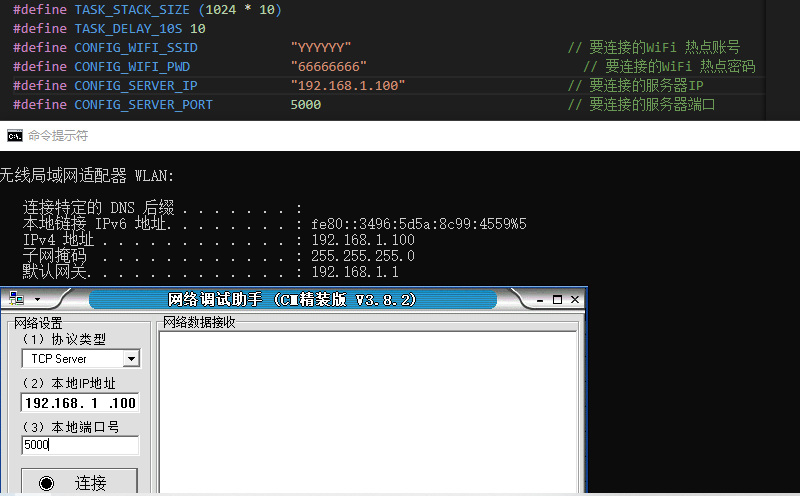
(1)电脑与 BearPi-HM Nano 开发板连入同一个 Wi-Fi 热点,如图:电脑与开发板都连入热点"YYYYYY";(2)BearPi-HM Nano 开发板程序设置的 IP,电脑的 IP,网络调试助手服务端的 IP,三者保持一致,如下图"192.168.1.100";
(3)点击网络调试助手的"连接"按钮,即先启动服务端。
2、BearPi-HM Nano 开发板串口接入电脑,设置波特率为 115200;
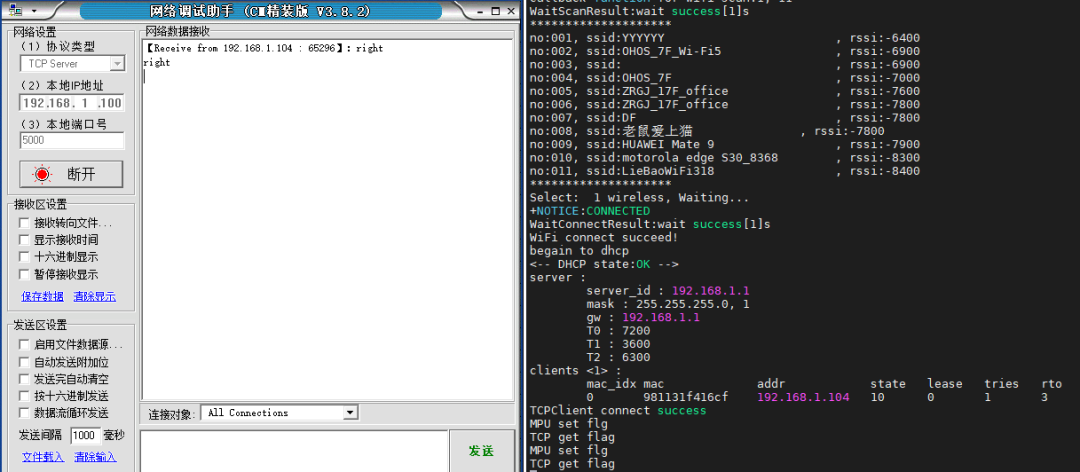
3、复位 BearPi-HM Nano 开发板,复位后,串口会打印 Wi-Fi 连接成功、TCP 连接成功等信息,如下图(右侧);
4、手握开发板,尝试出拳(即挥动开发板)。能看到网络助手的 TCP 服务端窗口,成功接收到同步挥拳信息“right”,如下图(左侧):
六、总结
本文主要讲述了拳击互动游戏中,关于设备端的开发,使用小熊派 BearPi-HM Nano(Hi3861)开发板硬件,在小熊派相关基础例程上做了二次开发。本设备端开发,使用了 OpenHarmony 的线程、事件、GPIO、IIC、TCP 通信等相关基础知识,再结合加速度计传感器的使用,实现与应用端同步交互的功能。
本样例是 OpenHarmony 知识体系工作组(相关链接在文章末尾)为广大开发者分享的样例。知识体系工作组结合日常生活,给开发者规划了各种场景的 Demo 样例,如智能家居场景、影音娱乐场景、运动健康场景等;欢迎广大开发者一同参与 OpenHarmony 的开发,更加完善样例,相互学习,相互进步。
七、参考连接
本样例代码下载链接:https://gitee.com/openharmony-sig/knowledge_demo_entainment/tree/master/dev/team_x/boxingOpenHarmony
知识体系共建开发仓:https://gitee.com/openharmony-sig/knowledge/blob/master/docs/co-construct_demos/README_zh.md
OpenHarmony 学习路径:https://growing.openharmony.cn/mainPlay/learnPath
小熊派 BearPi-HM Nano 开发板学习路径:https://growing.openharmony.cn/mainPlay/learnPathMaps?id=19
https://gitee.com/bearpi/bearpi-hm_nano/tree/master
润和 DAYU200(RK3568)开发板介绍:https://gitee.com/hihope_iot/docs/blob/master/HiHope_DAYU200/docs/README.md

OpenHarmony开发者官方账号 2021.12.15 加入
OpenHarmony是由开放原子开源基金会(OpenAtom Foundation)孵化及运营的开源项目,目标是面向全场景、全连接、全智能时代,基于开源的方式,搭建一个智能终端设备操作系统的框架和平台,促进万物互联产业的繁荣发展








评论